Research Work
NGD: Neural Gradient Based Deformation for Monocular Garment Reconstruction (ICCV 2025)
Dynamic garment reconstruction from monocular video is challenging due to complex, unconstrained cloth dynamics. While neural rendering has enabled high-quality reconstructions, implicit methods often smooth out fine details, and template-based approaches can introduce artifacts through vertex displacements. We propose NGD, a Neural Gradient-based Deformation method for reconstructing textured, dynamic garments from monocular video. Our approach includes an adaptive remeshing strategy to capture evolving surface details like wrinkles and pleats, and learns dynamic textures to model per-frame lighting and shadows. Extensive evaluations show NGD significantly outperforms existing SOTA methods.
Indoor Perception : Registration of Rigid object (ICVGIP 2024)
We present a novel infrastructure sensor node (ISN) consisting of a light detection and ranging (LiDAR) along with two monocular cameras mounted on the ceiling of the hallways of our laboratory to obtain relevant information. We present a perception pipeline that uses prior 3-D point cloud registration to localize objects in real time in dynamic indoor environments. We provided a complete case study to present a work that successfully detects, registers, and localizes objects through a dynamic environment with a high degree of occlusion.
Accurate and Real-time LiDAR Point Cloud Forecasting for Autonomous Driving (Sensors Journal 2024)
We propose two non-recurrent deep network models for point cloud forecasting using range image representation. By introducing a spatio-temporal convolution (STC) block in the latent space of range images, we predict future point clouds from past observations without relying on RNNs, enabling faster inference. The STC block has two variants incorporating temporal attention and InceptionNet blocks. Experiments on KITTI and NuScenes datasets demonstrate superior results compared to SOTA methods, offering a compact model with faster inference.
PROJECTS
Learning based control of Biped in soft terrain
Implemented a Reinforcement learning-based control for a biped robot travelling in deformable terrain conditions. Developed a simulator in PyChrono for a 9 DoF Biped traversing in soft terrain conditions using multibody dynamics. Initialised the gait trajectory as cycloidal and used DDPG to train the biped for gait and trajectory control.
Multi-Agent System : Slam in an Indoor Enviroment
We have implemented multiple robot-based mapping in Ros using Gmapping and frontier based exploration tecchnique. We have also completed navigation of multi robots in an indoor environment using Move-base algorithm. The software and packages used were ROS, ROBOTIS turtle bot, and move-base, Gmapping, and Frontier-based exploration.
Design and control of arm manipulator for ERC 2021 in Team Robocon IITR
Designed a 5D freedom robotic manipulator which will be used to complete various tasks in the rover competitions. It was actuated by a worm gear mechanism at its base along with a lead screw mechanism in the intermediate state with a bevel gear mechanism at the end. Gripper was based on four linkages actuated by a servo with a stereo camera attached at its end. The software was developed in Ros with the help of Moveit packages. AR_tags, Packages, and the manipulator were detected using AR_tags and the manipulator was navigated to the exact coordinate using move it commander. Technologies used- Solidworks, ADAMS, ROS, MoveIT, and Gazebo
AgroBot : Agricultural Robot
This project involved the design of an agricultural robot capable of transplanting, seed sowing,and weed removal. A modified rocker bogie suspension system was designed keeping in view the hilly regions the robot needs to traverse.A crank and a rocker mechanism was used for transplantation.A delta robot along with a weed detection algorithm was used for weed removal.A seed metering mechanism in combination with ploughers and levelers was used to sow the seeds at a constant rate.The multibody dynamics of all the mechanism were simulated in MSC ADAMS
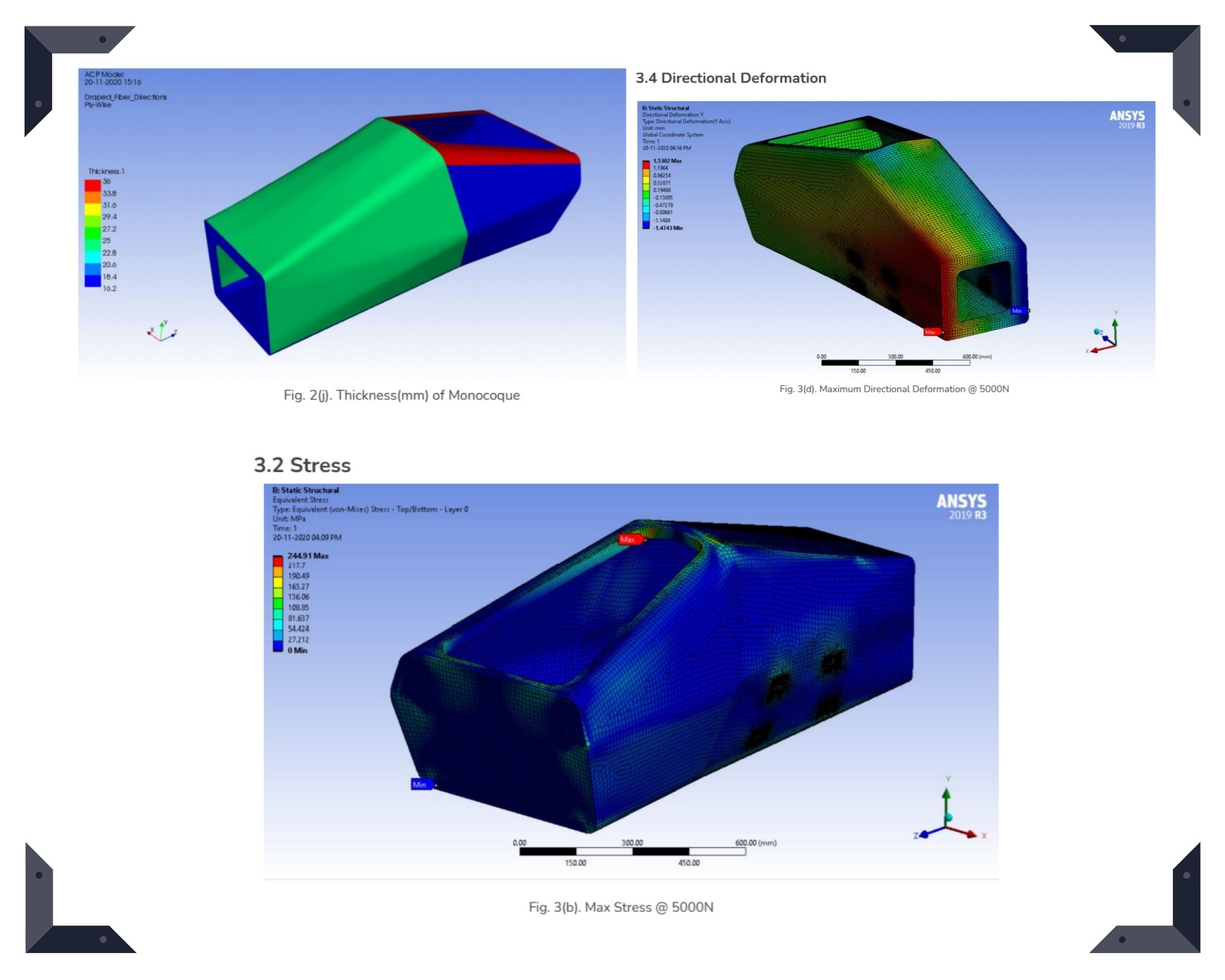
Design and Analysis of a Monocoque Chassis for FSAE Car
In this project we used Ansys ACP to layer up composite in the form of honeycomb and carbon prepreg.After that we calculated torsional rigidity in order to optimize the weight v/s factor of safety. We used both carbon prepreg 290 and 395 for the simulation simulation. Softwares Used - ANSYS, Solidworks, and Matlab.
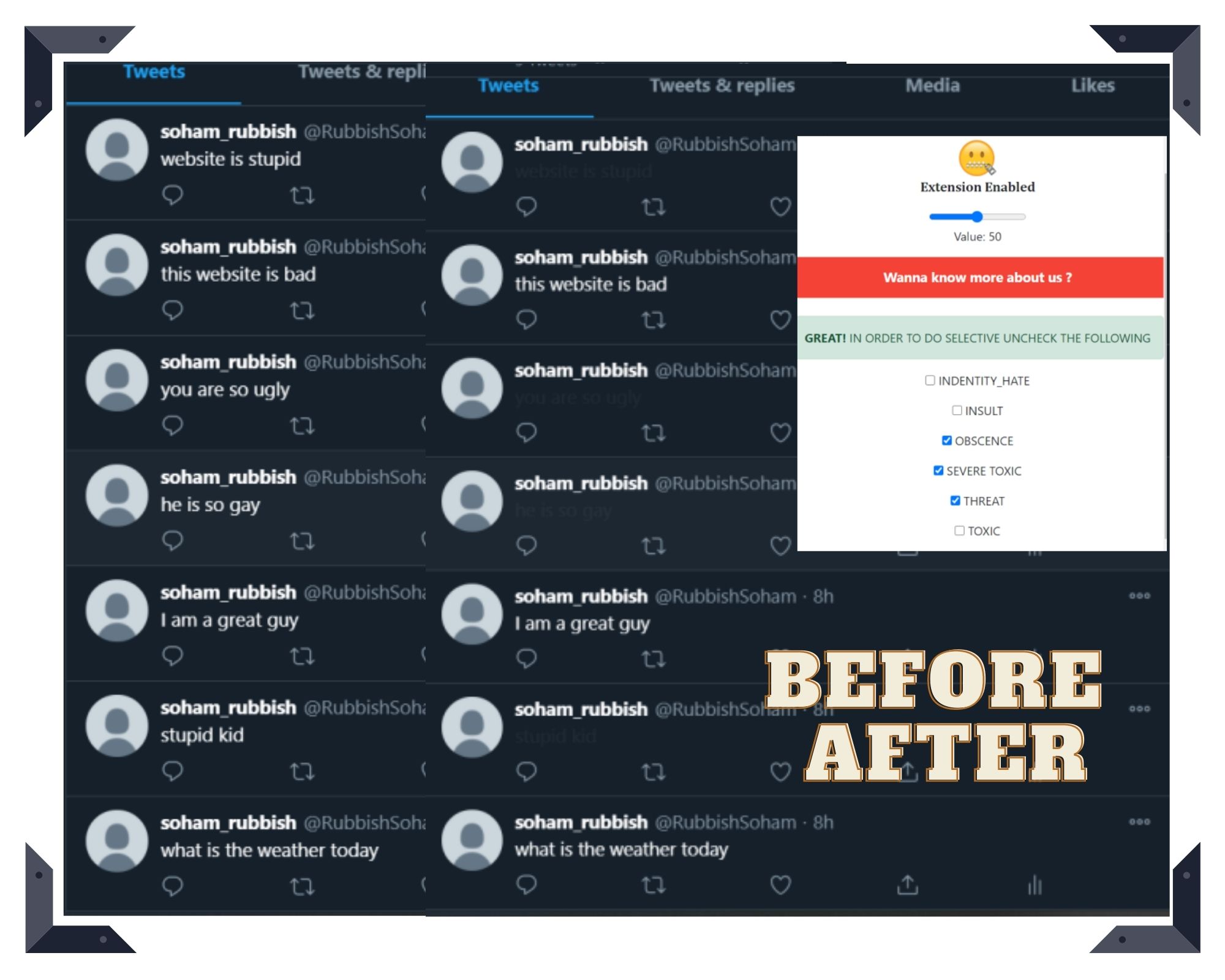
Devolopment of a hate filtering extension
Devoloped a hate filtering extension.The backend was a NLP model based on bag of words approach with SVM based classification algorithm. The items were sorted based upon their hate criteria and then the extension gave the option to customize their preference .
Design and control of a plannar biped robot
This project aim to control a plannar biped using inverted pendulum model to balance the ZMP.

Simulation of Rugby Playing Robots in Team Robocon IITR
We imported cad model of Robocon 2020 robots in Adams and controls were given to simulate the real-life scenario of the competition in order fast-forward designing by identifying major design flaws. Technologies Used - Adams, Solidworks, and Matlab
About Me
Hi I am a final year student at IITR. I love to build robots and interact with new technologies. I am really interested in computer vision and I am looking to build my future in that field. I am a coffee nerd and occasionally enjoy small company of people to discuss ideas. I love listening to music and sometimes try producing one.
My Resume